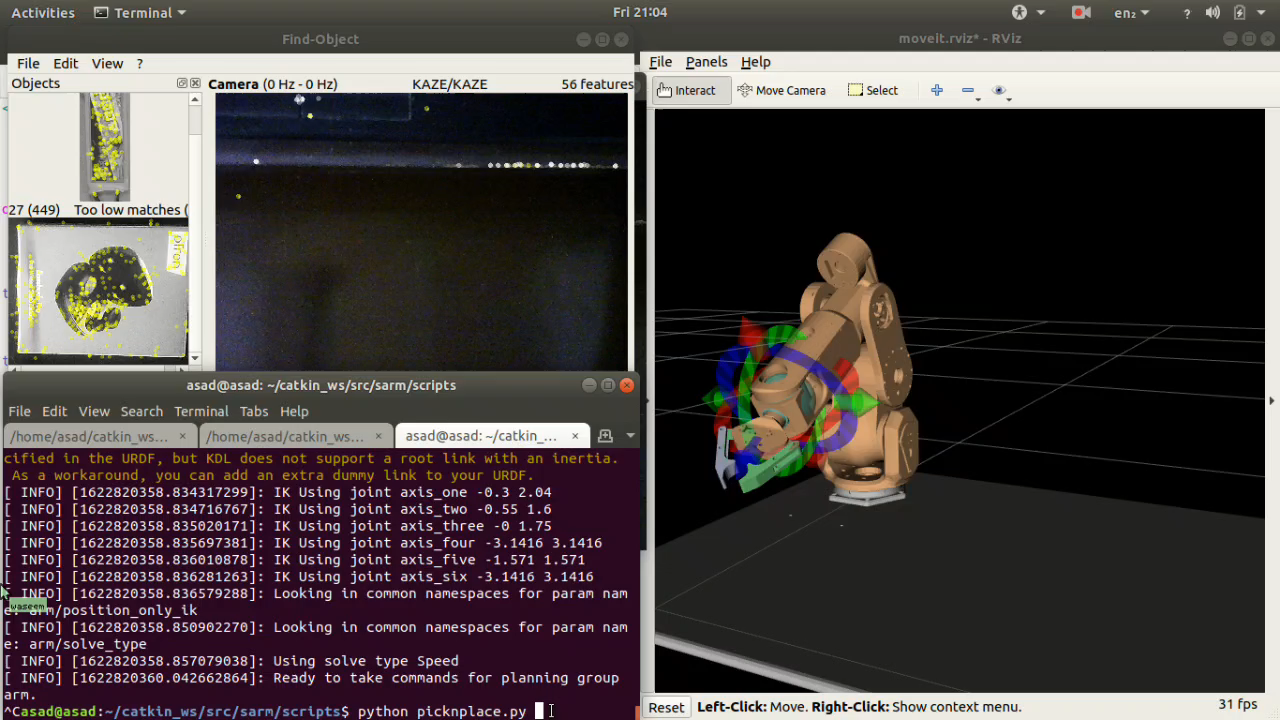
Synerginistic Articulated Robotic Manipulator (SARM)
An Autonomous Robotic Arm that picks any object within the specific area of workspace.
To get more details please read the thesis.
Gallery
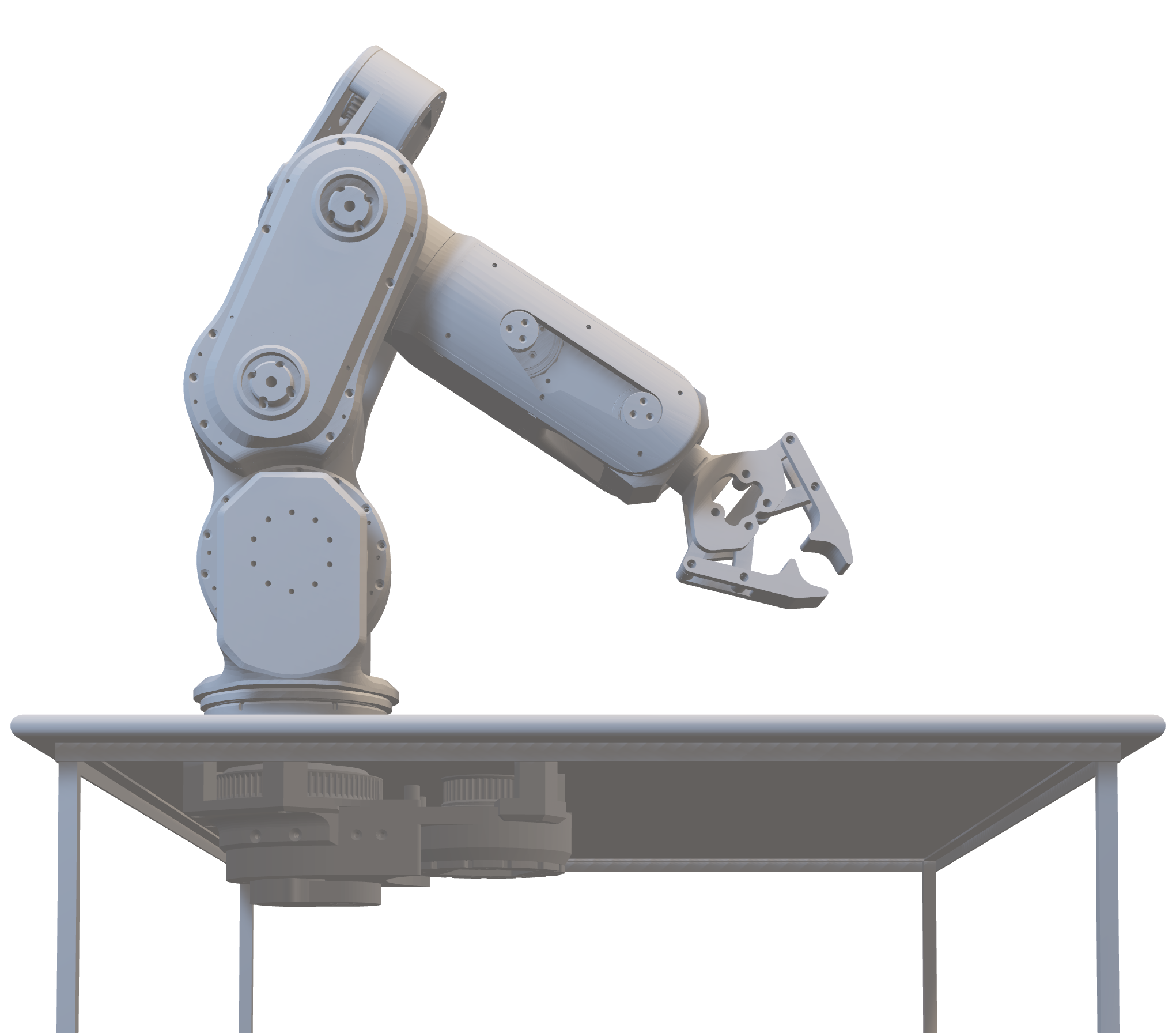
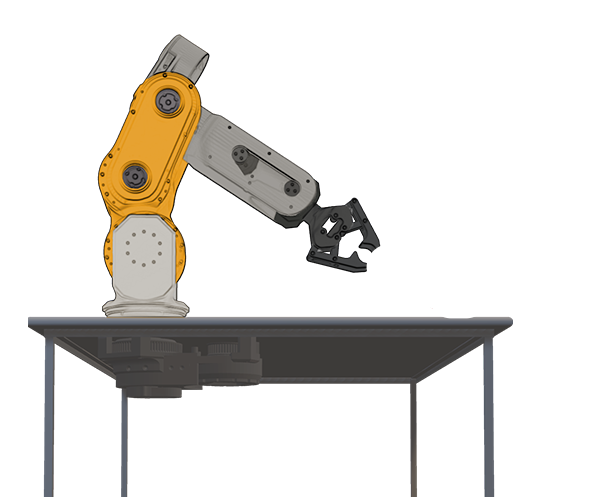
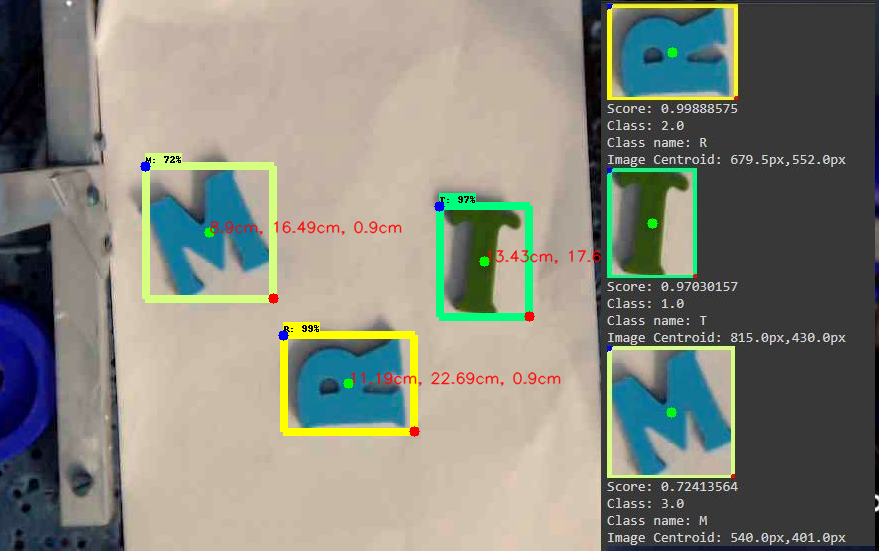
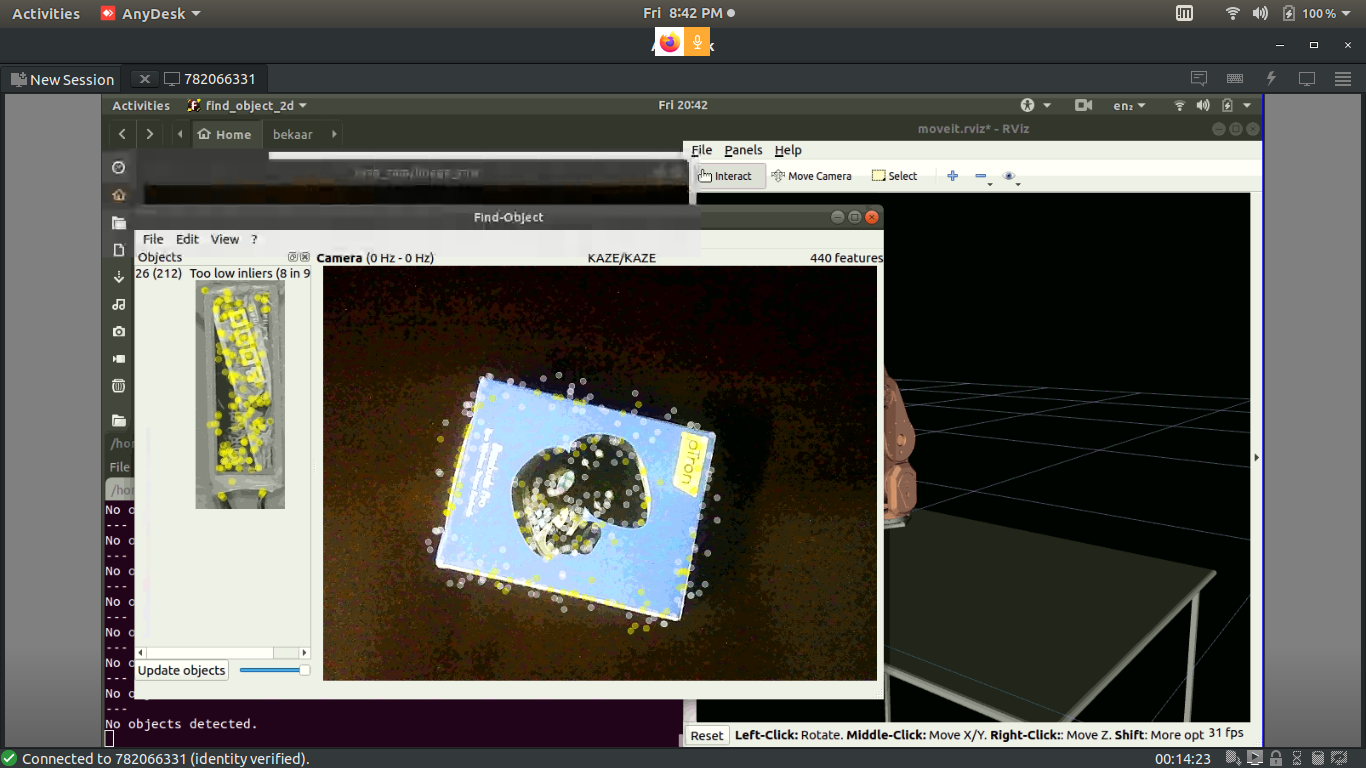
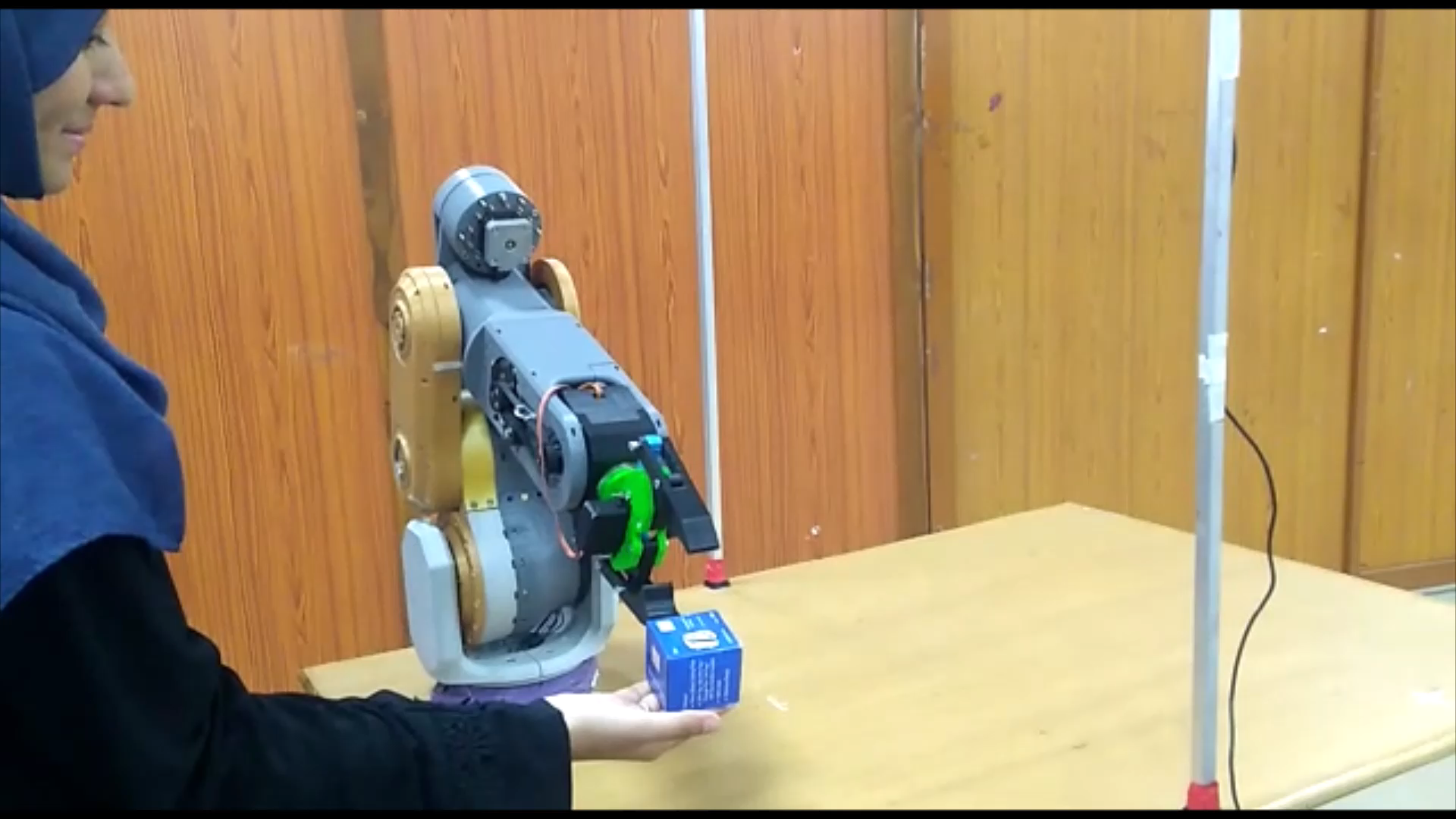
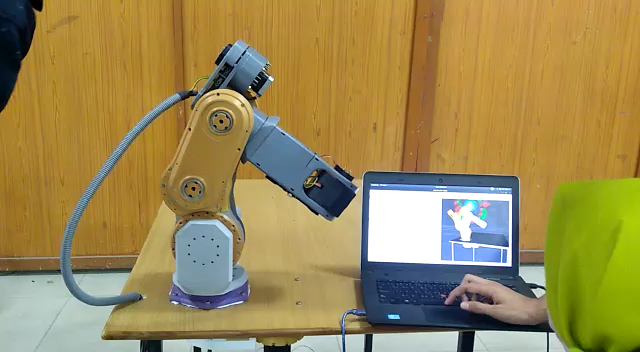
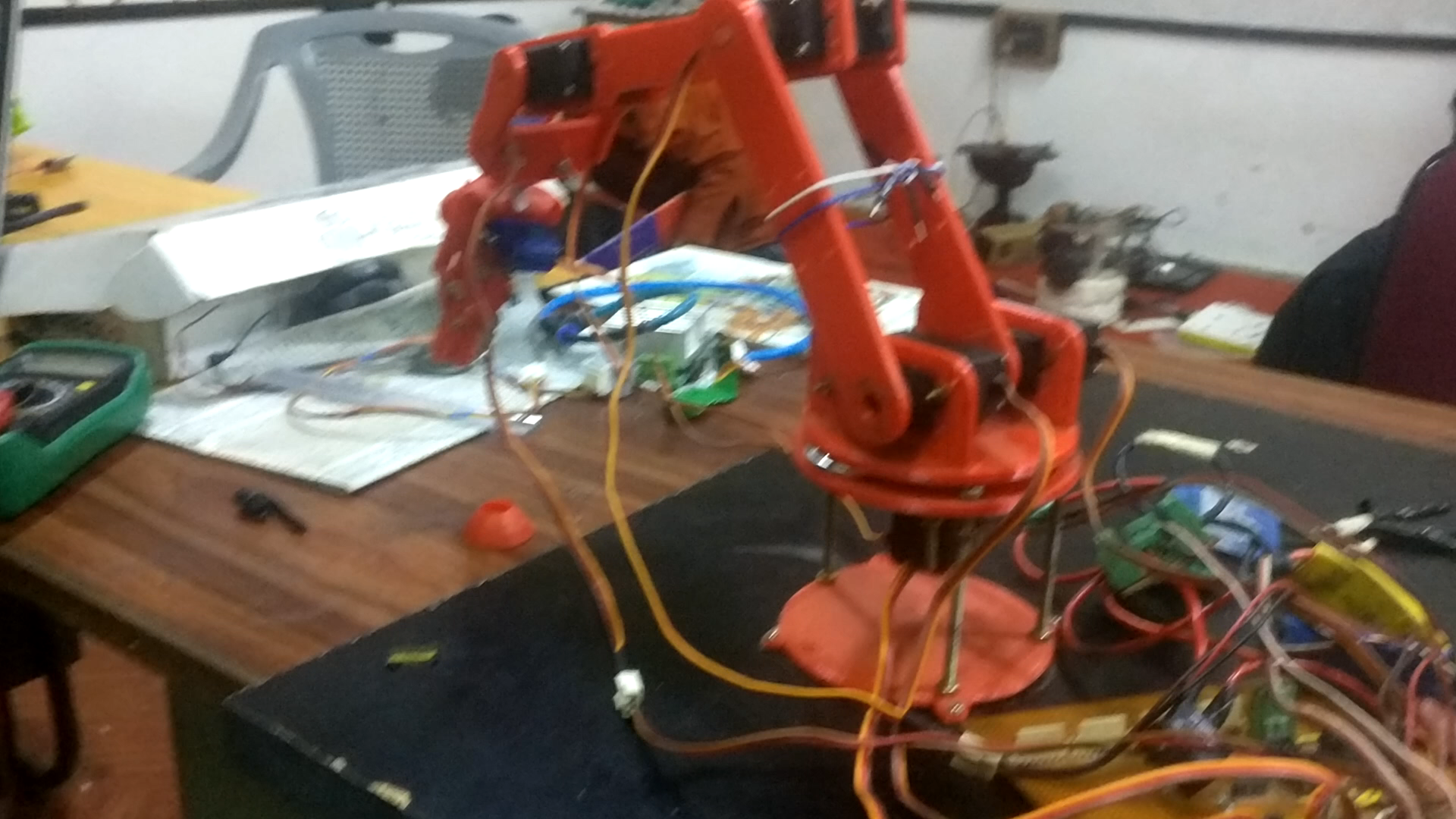
An Autonomous Robotic Arm that picks any object within the specific area of workspace.
To get more details please read the thesis.